
在人形机器人这一领域,我们面临一个重要问题:如何在降低布线数量的同时,对驱动器的通信进行优化,这直接关系到机器人性能的提升。下面,我们深入探讨这一问题的解决之道。
通信优化的重要性
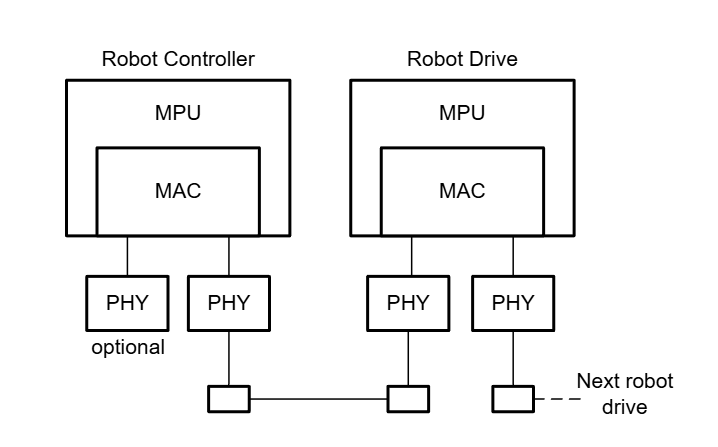
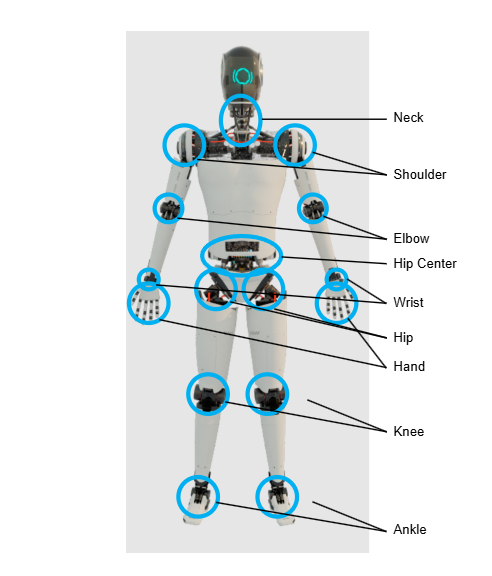
人形机器人中,驱动器的位置较为独特,因此,对驱动器间的通信进行优化,并减少布线数量,显得尤为重要。布线减少后,机器人内部结构将更加简洁,而通信优化则能提升信号传输的效率。以复杂动作为例,信号的快速、精确传递至关重要,这直接关系到机器人动作的流畅性。
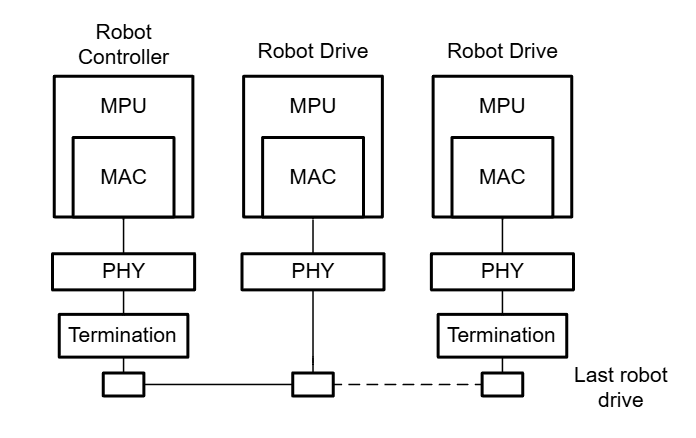
此法有助于降低成本并减少故障几率。缩短布线能节省材料及安装费用,优化通信流程可减少信号干扰和时延,从而降低故障的发生率。
位置数据接收
机器人运动时,需要获取电机位置信息以确定行走路线。有了精确的位置信息,机器人便能了解各个关节的运动方式。以模拟人类行走为例,电机位置信息有助于机器人步态更贴近人类自然的行走姿势。
若数据接收不准确,机器人动作可能变得不协调,严重时甚至可能跌倒。在以往的展览活动中,已有机器人因位置数据问题而出现动作异常的案例。
传感器与信息传递
为了实现高精度的移动,机器人必须配备转子位置感应器。这个感应器安装在电机上,负责收集相关信息,并将其通过驱动器传输至中央处理计算机。传感器就如同机器人的视觉系统,能够迅速而准确地捕捉电机的运行状态。而驱动器则如同快递员,将收集到的信息迅速传递给计算机。
这些传感器通过多种接口与驱动器相连,并传输转子角度信息。各个接口对硬件设备有着不同的要求,电机控制处理器需兼容这些接口。

电机类型与设计
人形机器人依赖电池供电,因此驱动器必须提升效率,以实现更长的使用时间。在功率需求较高时,会采用PMSM等电机。这类电机在高功率状态下仍能稳定运作,完全符合机器人进行复杂动作的要求。
电机设计的关键在于实现FET的快速切换,这一做法能带来新的设计选择,并提升电机在单位重量下的扭矩。例如,某些新型电机通过提升FET的切换效率,使机器人动作更为敏捷。
控制回路与算法选择
有多种途径可以实现控制回路,通常与图 4 相似,包括模拟子系统和外部处理器。依据不同的应用环境和具体要求,人们可以挑选适合的控制回路实施方法。
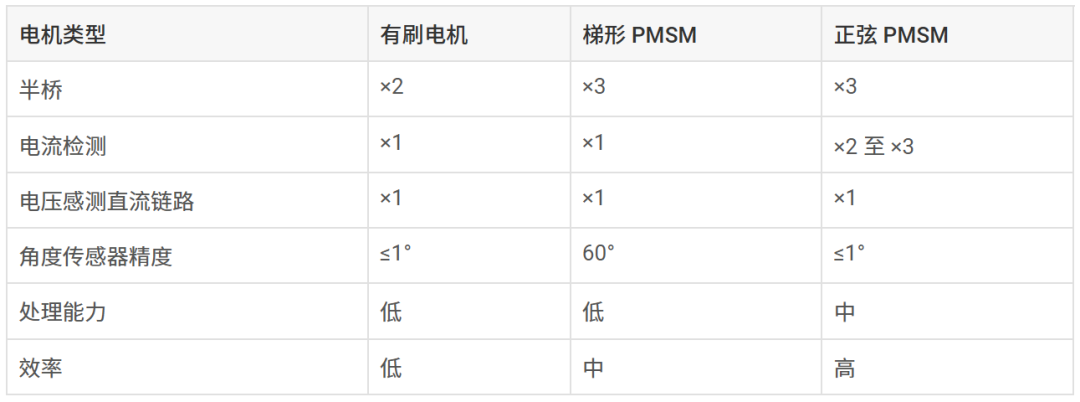
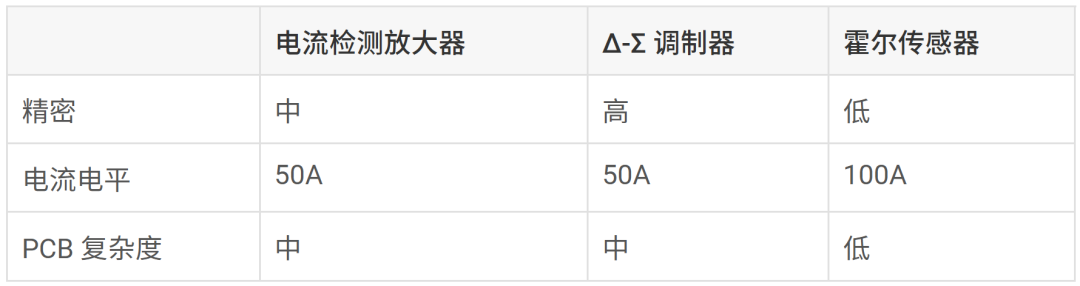
选用FOC算法或进行阻塞转向操作时,需留意所需的外部设备和性能指标。表1列出了相关内容,以供设计人员参考,辅助其作出恰当的决定。
元件选择与电流检测
为了降低系统产生的杂音,我们应选用在100V电压下仍能正常工作的元件。GaN FET这类新技术的应用,有助于提升开关的效率。TI公司生产的MOSFET栅极驱动器,能够实现MOSFET的快速切换。而TI公司推出的低压GaN FET,则为用户提供了多种FET类型的选择。
电流检测是设计时不可忽视的部分。德州仪器(TI)提供了多样的电流感应模拟选择和设计指导。技术进步使得电流检测所需的电流电平逐渐提升,现已接近100A。图6展示了解决1.5kW系统设计难题的方案。不妨思考,在人形机器人未来发展中,还有哪些核心技术有望实现突破?若觉得本文对您有所帮助,请点赞并分享。
发表回复